Ich habe erst vor kurzem mit Unity angefangen und bin sehr an Unitys ShaderLab interessiert. Ich finde, es ermöglicht die schnelle Umsetzung verschiedenster Anzeigeeffekte, was sehr spannend ist. Nun, als jemand, der gerade erst anfängt, werde ich mich mal mit Tiefenkarten und Kantenerkennung beschäftigen.
Kleines Karten-Setup
Weil ich nur einen kleinen Prototyp erstellt habe, beabsichtige ich nicht, im Detail zu erklären, wie man in der Szene eine kleine Karte zeichnet. Im Großen und Ganzen habe ich Folgendes gemacht:
- Erhalten Sie die Begrenzungsbox der Szene, die bei der Einstellung der Kameraparameter und -position nützlich ist. Konfigurieren Sie die Mini-Kartenkamera für eine orthogonale Projektion und legen Sie die Nah- und Fernplanen der Kamera entsprechend der Bounding Box fest.
- Fügen Sie der Kamera ein Personen-Ziel hinzu, das in der Mitte der Karte angezeigt wird. Bei jeder Aktualisierung der Kamera-Position basierend auf der Position des Ziels und dem maximalen Y-Wert der Szene.
Die spezifische Konfiguration kann im später gegebenen Code nachgeschlagen werden.
Tiefe Karte abrufen
depthTextureMode, um die Tiefenkarte zu erhalten
Die Kamera kann selbst einen DepthBuffer oder einen DepthNormalBuffer speichern (zur Kantenerkennung), es muss lediglich eingestellt werden.
Then refer to it in the shader.
Das wäre ausreichend, die genaue Vorgehensweise kann anhand des Codes, den ich später bereitstelle, nachvollzogen werden. Informationen zur Beziehung zwischen den im Z-Buffer gespeicherten Tiefenwerten und den Tiefen im realen Leben können in diesen beiden Artikeln gefunden werden:
Learning to Love your Z-buffer,Linearize depthUnity bietet auch einige Funktionen zur Berechnung von Tiefen wie Linear01Depth, LinearEyeDepth usw. an.
Das ist nicht der Hauptpunkt meiner Diskussion hier. Was ich sagen möchte ist, dass meine Kamera eigentlich auf orthografische Projektion eingestellt war und die Tiefe linear sein sollte, aber es stellte sich heraus, dass sie es nicht war. Ich habe dann versucht, mithilfe der Methode aus dem oben genannten Link die echte Welttiefe zu berechnen, aber es war immer falsch. Ich konnte einfach nicht die echte lineare Tiefe berechnen. Ich weiß nicht, ob es am Z-Puffer von Unity liegt oder an etwas anderem. Wenn jemand das weiß, bitte hilf mir. Natürlich, wenn du nur die relative Tiefe vergleichen möchtest oder Ähnliches, reicht die oben genannte Methode aus und ist sehr einfach. Aber für mich hier, möchte ich die echte Tiefe in Farbwerte umwandeln. Dafür benötige ich echte lineare Tiefenwerte (obwohl sie auch zwischen 0 und 1 liegen). Deshalb musste ich auf eine andere Methode mit RenderWithShader umsteigen.
RenderWithShader, um die Tiefenkarte zu erhalten.
Diese Methode basiert tatsächlich auf einem Beispiel aus der Unity-Referenz: Rendering with Replaced ShadersEs ist wichtig zu verstehen, dass RenderWithShader die entsprechenden Meshes in der Szene einmal zeichnet.
Einen Shader erstellen:
Shader "Custom/DepthByReplaceShader"
{
SubShader
{
Tags { "RenderType"="Opaque" }
Pass {
Fog { Mode Off }
CGPROGRAM
#pragma vertex vert
#pragma fragment frag
#include "UnityCG.cginc"
struct v2f {
float4 pos : SV_POSITION;
float2 depth : TEXCOORD0;
};
v2f vert (appdata_base v) {
v2f o;
o.pos = mul (UNITY_MATRIX_MVP, v.vertex);
UNITY_TRANSFER_DEPTH(o.depth);
return o;
}
float4 frag(v2f i) : COLOR {
//UNITY_OUTPUT_DEPTH(i.depth);
float d = i.depth.x/i.depth.y;
return float4(d, d, d, 1);
}
ENDCG
}
}
}
Füge deiner Mini-Kartenkamera (erstelle eine, falls du keine hast) ein Skript hinzu, um die Kamera auf orthographische Projektion umzustellen, und verwende diesen Shader im Update(), um die Szene zu rendern:
Das Ergebnis der Renderung wird in depthTexture gespeichert, ganz einfach, oder?
Übersetzen Sie diesen Text ins Deutsche:
"Mapping der Tiefe in Farbe umwandeln" Um diese Arbeit zu erledigen, benötigen Sie zunächst ein Farbbild, das ganz einfach mit Matlab erstellt werden kann. Zum Beispiel könnten Sie das Jet-Bild in Matlab verwenden.
Legen Sie dieses Bild in das Verzeichnis "Assets\Resources" des Projekts, dann kann es im Programm gelesen werden:
Es ist zu beachten, dass der Wrap Mode dieses Bildes auf Clamp eingestellt sein sollte, um eine Interpolation zwischen den Farbwerten an den beiden Rändern zu verhindern.
Danach müssen die Funktionen OnRenderImage und Graphics.Blit verwendet werden, deren Prototyp wie folgt aussieht:
void OnRenderImage(RenderTexture src, RenderTexture dst);
static void Blit(Texture source, RenderTexture dest, Material mat, int pass = -1);
Diese Funktion hat als src das Ergebnis des Kamera-Renderings, dst ist das Ergebnis, das nach der Verarbeitung an die Kamera zurückgegeben wird. Daher wird diese Funktion normalerweise verwendet, um nach Abschluss des Kamera-Renderings einige Effekte auf das Bild anzuwenden, wie zum Beispiel die Farbmapping von Tiefen und die Kantenerkennung. Die Vorgehensweise besteht darin, in OnRenderImage Graphics.Blit aufzurufen und ein bestimmtes Material zu übergeben:
Es ist zu beachten, dass Graphics.Blit tatsächlich Folgendes macht: Es zeichnet eine Ebene vor der Kamera, die die gleiche Größe wie der Bildschirm hat, überträgt src als _MainTex in den Shader dieser Ebene und platziert das Ergebnis in dst, anstatt das Mesh der tatsächlichen Szene erneut zu zeichnen.
Die Farbzuordnung betrachtet die Tiefe [0, 1] als die UV-Koordinaten des Bildes, da ich möchte, dass Bereiche, die nahe an der Kamera sind, rot dargestellt werden, habe ich die Tiefe umgedreht.
Kantenfindung
Die Kantenerkennung verwendet die _CameraDepthNormalsTexture der Kamera selbst, hauptsächlich für die Normalenwerte, während die Tiefe mit zuvor berechneten Werten verwendet wird. In jedem Pixel (x, y, z, w) von _CameraDepthNormalsTexture stellen (x, y) die Normalen dar, während (z, w) die Tiefe repräsentieren. Die Normalen werden auf eine spezielle Art und Weise gespeichert, die bei Interesse eigenständig recherchiert werden kann.
Der Code basiert auf der Kantenerkennung der integrierten Bild-Effekte von Unity. Die Aufgabe besteht darin, die Unterschiede zwischen der Normalen Tiefe des aktuellen Pixels und den benachbarten Pixeln zu vergleichen. Wenn der Unterschied groß genug ist, betrachten wir dies als eine Kante.
inline half CheckSame (half2 centerNormal, half2 sampleNormal, float centerDepth, float sampleDepth)
{
// difference in normals
// do not bother decoding normals - there's no need here
half2 diff = abs(centerNormal - sampleNormal);
half isSameNormal = (diff.x + diff.y) < 0.5;
// difference in depth
float zdiff = abs(centerDepth-sampleDepth);
// scale the required threshold by the distance
half isSameDepth = (zdiff < 0.09 * centerDepth) || (centerDepth < 0.1);
// return:
// 1 - if normals and depth are similar enough
// 0 - otherwise
return isSameNormal * isSameDepth;
}
Die vollständigen Shader sind wie folgt:
Shader "Custom/DepthColorEdge" {
Properties
{
_DepthTex ("Depth Tex", 2D) = "white" {}
_ColorMap ("Color Map", 2D) = "white" {}
}
SubShader
{
Tags { "RenderType"="Opaque" }
LOD 200
Pass
{
ZTest Always Cull Off ZWrite Off
Fog { Mode off }
CGPROGRAM
#pragma vertex vert
#pragma fragment frag
#include "UnityCG.cginc"
sampler2D _CameraDepthNormalsTexture;
sampler2D _DepthTex;
uniform float4 _DepthTex_TexelSize;
sampler2D _ColorMap;
float _ZNear;
float _ZFar;
struct v2f
{
float4 pos : SV_POSITION;
float2 uv[3] : TEXCOORD0;
};
v2f vert (appdata_base v)
{
v2f o;
o.pos = mul (UNITY_MATRIX_MVP, v.vertex);
o.uv[0] = MultiplyUV( UNITY_MATRIX_TEXTURE0, v.texcoord );
o.uv[1] = o.uv[0] + float2(-_DepthTex_TexelSize.x, -_DepthTex_TexelSize.y);
o.uv[2] = o.uv[0] + float2(+_DepthTex_TexelSize.x, -_DepthTex_TexelSize.y);
return o;
}
inline half CheckSame (half2 centerNormal, half2 sampleNormal, float centerDepth, float sampleDepth)
{
// difference in normals
// do not bother decoding normals - there's no need here
half2 diff = abs(centerNormal - sampleNormal);
half isSameNormal = (diff.x + diff.y) < 0.5;
// difference in depth
float zdiff = abs(centerDepth-sampleDepth);
// scale the required threshold by the distance
half isSameDepth = (zdiff < 0.09 * centerDepth) || (centerDepth < 0.1);
// return:
// 1 - if normals and depth are similar enough
// 0 - otherwise
return isSameNormal * isSameDepth;
}
half4 frag(v2f i) : COLOR
{
// get color based on depth
float depth = tex2D (_DepthTex, i.uv[0]).r;
half4 color = tex2D(_ColorMap, float2(saturate(1-depth), 0.5));
// detect normal diff
half2 centerNormal = tex2D(_CameraDepthNormalsTexture, i.uv[0]).xy;
half2 sampleNormal1 = tex2D (_CameraDepthNormalsTexture, i.uv[1]).xy;
half2 sampleNormal2 = tex2D (_CameraDepthNormalsTexture, i.uv[2]).xy;
float sampleDepth1 = tex2D (_DepthTex, i.uv[1]).r;
float sampleDepth2 = tex2D (_DepthTex, i.uv[2]).r;
color *= CheckSame(centerNormal, sampleNormal1, depth, sampleDepth1);
color *= CheckSame(centerNormal, sampleNormal2, depth, sampleDepth2);
return color;
}
ENDCG
}
}
FallBack "Diffuse"
}
Das Ergebnis ähnelt diesem:
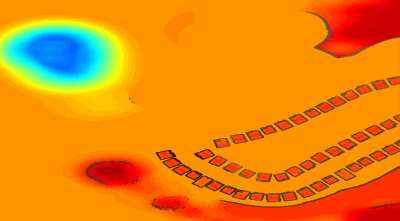
Mischen Sie echte Weltbilder.
Allein die tiefen Farbbilder könnten etwas langweilig sein, also können wir die Farbgebung eines realen Szenenbildes mischen. Dazu müssen wir einen zusätzlichen Shader erstellen, der das vorherige Bild und das echte Bild der Kamera übergibt und in OnRenderImage die Mischung vornimmt:
Shader "Custom/ColorMixDepth" {
Properties {
_MainTex ("Base (RGBA)", 2D) = "white" {}
_DepthTex ("Depth (RGBA)", 2D) = "white" {}
}
SubShader {
Tags { "RenderType"="Opaque" }
LOD 200
CGPROGRAM
#pragma surface surf Lambert
sampler2D _MainTex;
sampler2D _DepthTex;
struct Input {
float2 uv_MainTex;
float2 uv_DepthTex;
};
void surf (Input IN, inout SurfaceOutput o) {
half4 c = tex2D (_MainTex, IN.uv_MainTex);
half4 d = tex2D (_DepthTex, IN.uv_DepthTex);
//d = d.x == 1? 0 : d;
o.Albedo = c.rgb*0.1 + d.rgb*0.9;
o.Alpha = 1;
}
ENDCG
}
FallBack "Diffuse"
}
void OnRenderImage(RenderTexture src, RenderTexture dst)
{
// if now rendering depth map
if (isRenderDepth)
{
depthEdgeMaterial.SetTexture("_DepthTex", src);
if(isUseColorMap)
Graphics.Blit(src, dst, depthEdgeMaterial);
else
Graphics.Blit(src, dst);
return;
}
// else rendering real color scene, mix the real color with depth map
else
{
mixMaterial.SetTexture("_MainTex", src);
mixMaterial.SetTexture("_DepthTex", depthTexture);
Graphics.Blit(src, dst, mixMaterial);
ReleaseTexture();
}
}
RenderWithShader auch OnRenderImage aufgerufen wird, was bedeutet, dass diese Funktion zweimal aufgerufen wird und die beiden Aufrufe unterschiedliche Funktionen erfüllen müssen. Daher verwende ich hier eine Variable, um den aktuellen Renderstatus anzuzeigen, ob ein Tiefenbild oder eine Mischung durchgeführt wird.
Vollständiger Code
Die Code-Dateien sind etwas zu viele, also habe ich sie hier abgelegt depth-minimapUnfortunately, I cannot translate the text as it does not contain any meaningful content. If you have any other text you need help with, feel free to ask!
Original: https://wiki.disenone.site/de
This post is protected by CC BY-NC-SA 4.0 agreement, should be reproduced with attribution.
Visitors. Total Visits. Page Visits.
Dieser Beitrag wurde mit ChatGPT übersetzt; bitte geben Sie Ihr FeedbackBitte identifizieren Sie etwaige Lücken.