刚接触Unity没多久,对Unity的ShaderLab一直很感兴趣,感觉它可以快速地实现各种各样的显示效果,很有意思。嘛,作为一个门都还没入的人,我就来搞一搞深度图和边缘检测吧。
小地图设置
因为我只是做了一个小雏形,所以我不打算详细地讲如何去在场景上画小地图,大致上说我做了以下一些事情:
- 获取场景的 bounding box,这个在设置相机的参数和位置时有用
- 把小地图相机配置成正交投影,根据 bounding box 设置相机的近平面和远平面
- 为该相机增加一个人物目标,目标会显示在地图的中心
- 每次更新相机的位置,根据目标的位置,还有场景的最大 y 值
具体的配置可以参考后面给出的代码。
获取深度图
depthTextureMode 来获取深度图
相机自己可以保存DepthBuffer或者一个DepthNormalBuffer(可用来做边缘检测),只需要设置
然后在Shader里面引用
就可以了,具体的做法可以参考我后面给出的代码。关于在Z-Buffer里面保存的深度值跟真实世界的深度的关系可以参考这两篇文章:
Learning to Love your Z-buffer,Linearize depth。另外 Unity 也提供了一些函数来计算深度: Linear01Depth, LinearEyeDepth 等。
这不是我这里讨论的重点,我想说的是,本来我的相机设置为正交投影,深度应该是线性的,但我测试出来却不是线性。然后我用上面链接介绍的方法来计算真实世界的深度,也一直都不正确,以至于一直计算不出真实的线性深度,不知道是Unity的Z_Buffer的问题还是什么,那位朋友知道的请教教我。当然,如果不需要真实的深度值,单单是比较深度的大小之类的,用上面的方法就足够了,而且很简单。但是对于我这里来说,我想要把真实深度映射为颜色值,需要获得真实的线性的深度值(虽然也是[0, 1]),我只好用另外一种用 RenderWithShader 方法了。
RenderWithShader 来获取深度图
这种方法其实就是用Unity Reference里面的一个例子:Rendering with Replaced Shaders。需要理解的是,RenderWithShader会把场景中的相应的Mesh画一遍。
创建一个 Shader :
Shader "Custom/DepthByReplaceShader"
{
SubShader
{
Tags { "RenderType"="Opaque" }
Pass {
Fog { Mode Off }
CGPROGRAM
#pragma vertex vert
#pragma fragment frag
#include "UnityCG.cginc"
struct v2f {
float4 pos : SV_POSITION;
float2 depth : TEXCOORD0;
};
v2f vert (appdata_base v) {
v2f o;
o.pos = mul (UNITY_MATRIX_MVP, v.vertex);
UNITY_TRANSFER_DEPTH(o.depth);
return o;
}
float4 frag(v2f i) : COLOR {
//UNITY_OUTPUT_DEPTH(i.depth);
float d = i.depth.x/i.depth.y;
return float4(d, d, d, 1);
}
ENDCG
}
}
}
为你的小地图相机(没有的话创建之)添加一个脚本,把相机配置成正交投影等,并且在 Update() 里面使用这个 Shader 来渲染场景:
渲染的结果就会保存在 depthTexture里面,很简单吧。
把深度映射成颜色
要完成这个工作,首先需要一张颜色图,这张图可以用 Matlab 很简单地生成,例如我用的是 Matlab 里面的 jet 图:
把这张图放到项目目录 Assets\Resources 里面,就可以在程序中读取:
需要注意的是,这张图片的 Wrap Mode 应该是 Clamp,防止在两边缘的颜色值之间进行插值。
之后就需要使用 OnRenderImage 和 Graphics.Blit 函数,函数的原型为:
void OnRenderImage(RenderTexture src, RenderTexture dst);
static void Blit(Texture source, RenderTexture dest, Material mat, int pass = -1);
这个函数的 src 是相机渲染的结果,dst 是处理后传回给相机的结果,因此这个函数通常是用来在相机渲染完成后做图片的一些效果,例如我们这里的对深度做颜色映射,还有边缘检测。做法就是在OnRenderImage中调用Graphics.Blit,传入特定的Material:
需要注意的是,Graphics.Blit实际上做了这样一件事情:在相机前面画一个跟屏幕大小一样的平面,把src作为这个平面的_MainTex传进Shader中,然后把结果放到dst里面,而不是把实际场景中的Mesh重新画一遍。
对颜色映射其实就是把深度 [0, 1] 看成图片的 uv,因为我想距离相机近的为红色,所以我对深度取了反:
边缘检测
边缘检测需要用到了相机自己的 _CameraDepthNormalsTexture,主要是用 Normal 的值,深度还是用之前计算出来的。在 _CameraDepthNormalsTexture 的每个像素 (x, y, z, w) 中,(x, y) 是法向,(z, w)是深度,法向是用了一种方法来存放的,有兴趣可以自己搜索。
代码是参考了 Unity 自带的 Image Effect 里面的边缘检测,需要做的事情就是,比较当前像素的法向深度和邻近像素的差别,足够大我们就认为存在边缘:
inline half CheckSame (half2 centerNormal, half2 sampleNormal, float centerDepth, float sampleDepth)
{
// difference in normals
// do not bother decoding normals - there's no need here
half2 diff = abs(centerNormal - sampleNormal);
half isSameNormal = (diff.x + diff.y) < 0.5;
// difference in depth
float zdiff = abs(centerDepth-sampleDepth);
// scale the required threshold by the distance
half isSameDepth = (zdiff < 0.09 * centerDepth) || (centerDepth < 0.1);
// return:
// 1 - if normals and depth are similar enough
// 0 - otherwise
return isSameNormal * isSameDepth;
}
完整的 Shader 如下:
Shader "Custom/DepthColorEdge" {
Properties
{
_DepthTex ("Depth Tex", 2D) = "white" {}
_ColorMap ("Color Map", 2D) = "white" {}
}
SubShader
{
Tags { "RenderType"="Opaque" }
LOD 200
Pass
{
ZTest Always Cull Off ZWrite Off
Fog { Mode off }
CGPROGRAM
#pragma vertex vert
#pragma fragment frag
#include "UnityCG.cginc"
sampler2D _CameraDepthNormalsTexture;
sampler2D _DepthTex;
uniform float4 _DepthTex_TexelSize;
sampler2D _ColorMap;
float _ZNear;
float _ZFar;
struct v2f
{
float4 pos : SV_POSITION;
float2 uv[3] : TEXCOORD0;
};
v2f vert (appdata_base v)
{
v2f o;
o.pos = mul (UNITY_MATRIX_MVP, v.vertex);
o.uv[0] = MultiplyUV( UNITY_MATRIX_TEXTURE0, v.texcoord );
o.uv[1] = o.uv[0] + float2(-_DepthTex_TexelSize.x, -_DepthTex_TexelSize.y);
o.uv[2] = o.uv[0] + float2(+_DepthTex_TexelSize.x, -_DepthTex_TexelSize.y);
return o;
}
inline half CheckSame (half2 centerNormal, half2 sampleNormal, float centerDepth, float sampleDepth)
{
// difference in normals
// do not bother decoding normals - there's no need here
half2 diff = abs(centerNormal - sampleNormal);
half isSameNormal = (diff.x + diff.y) < 0.5;
// difference in depth
float zdiff = abs(centerDepth-sampleDepth);
// scale the required threshold by the distance
half isSameDepth = (zdiff < 0.09 * centerDepth) || (centerDepth < 0.1);
// return:
// 1 - if normals and depth are similar enough
// 0 - otherwise
return isSameNormal * isSameDepth;
}
half4 frag(v2f i) : COLOR
{
// get color based on depth
float depth = tex2D (_DepthTex, i.uv[0]).r;
half4 color = tex2D(_ColorMap, float2(saturate(1-depth), 0.5));
// detect normal diff
half2 centerNormal = tex2D(_CameraDepthNormalsTexture, i.uv[0]).xy;
half2 sampleNormal1 = tex2D (_CameraDepthNormalsTexture, i.uv[1]).xy;
half2 sampleNormal2 = tex2D (_CameraDepthNormalsTexture, i.uv[2]).xy;
float sampleDepth1 = tex2D (_DepthTex, i.uv[1]).r;
float sampleDepth2 = tex2D (_DepthTex, i.uv[2]).r;
color *= CheckSame(centerNormal, sampleNormal1, depth, sampleDepth1);
color *= CheckSame(centerNormal, sampleNormal2, depth, sampleDepth2);
return color;
}
ENDCG
}
}
FallBack "Diffuse"
}
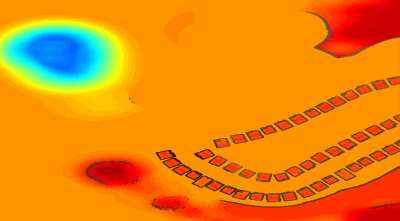
结果类似于这个:
混合真实世界图像
单单是深度的颜色图可能有点无趣,那么我们可以混合上真实场景的颜色图,只需要再建一个 Shader,传入前面的图像和相机的真实图像,在 OnRenderImage 中进行混合:
Shader "Custom/ColorMixDepth" {
Properties {
_MainTex ("Base (RGBA)", 2D) = "white" {}
_DepthTex ("Depth (RGBA)", 2D) = "white" {}
}
SubShader {
Tags { "RenderType"="Opaque" }
LOD 200
CGPROGRAM
#pragma surface surf Lambert
sampler2D _MainTex;
sampler2D _DepthTex;
struct Input {
float2 uv_MainTex;
float2 uv_DepthTex;
};
void surf (Input IN, inout SurfaceOutput o) {
half4 c = tex2D (_MainTex, IN.uv_MainTex);
half4 d = tex2D (_DepthTex, IN.uv_DepthTex);
//d = d.x == 1? 0 : d;
o.Albedo = c.rgb*0.1 + d.rgb*0.9;
o.Alpha = 1;
}
ENDCG
}
FallBack "Diffuse"
}
void OnRenderImage(RenderTexture src, RenderTexture dst)
{
// if now rendering depth map
if (isRenderDepth)
{
depthEdgeMaterial.SetTexture("_DepthTex", src);
if(isUseColorMap)
Graphics.Blit(src, dst, depthEdgeMaterial);
else
Graphics.Blit(src, dst);
return;
}
// else rendering real color scene, mix the real color with depth map
else
{
mixMaterial.SetTexture("_MainTex", src);
mixMaterial.SetTexture("_DepthTex", depthTexture);
Graphics.Blit(src, dst, mixMaterial);
ReleaseTexture();
}
}
RenderWithShader 的时候,OnRenderImage 也会被调用,也就是这个函数被调用了两次,而两次调用需要完成的功能是不同的,所以我这里用一个变量来指示当前的渲染状态是做深度图还是混合。
完整的代码
代码文件有点多,就放到这里了depth-minimap。
原文地址:https://wiki.disenone.site
本篇文章受 CC BY-NC-SA 4.0 协议保护,转载请注明出处。
Visitors. Total Visits. Page Visits.